해당 게시물은 Torch Vision의 객체 감지 미세조정 튜토리얼을 참고하여 작성되었습니다.
Pytorch에서 제공하는 Coco 데이터로 사전 훈련된 FasterRCNN을 활용하여 보행자 감지(detection) 및 분할(segmentation)을 위해 Penn-Fudan 데이터로 파라미터 튜닝을 진행합니다. Penn-Fudan 데이터는 345개의 보행자 정보가 포함된 총 170개의 이미지가 포함되어 있습니다.
실습 준비
Download
최초 1회 아래의 주석을 풀어 cutom function과 Penn-Fudan 데이터를 다운로드합니다.
# !wget https://raw.githubusercontent.com/pytorch/vision/main/references/detection/engine.py
# !wget https://raw.githubusercontent.com/pytorch/vision/main/references/detection/utils.py
# !wget https://raw.githubusercontent.com/pytorch/vision/main/references/detection/coco_utils.py
# !wget https://raw.githubusercontent.com/pytorch/vision/main/references/detection/coco_eval.py
# !wget https://raw.githubusercontent.com/pytorch/vision/main/references/detection/transforms.py패키지 Import
# Deafult
import os
# Image
import matplotlib
import matplotlib.pyplot as plt
import matplotlib.image as img
import matplotlib.patches as patches
import cv2
from torchvision.utils import draw_bounding_boxes, draw_segmentation_masks
# Model
import torch
import torchvision
from torchvision.io import read_image
from torchvision import tv_tensors
from torchvision.ops.boxes import masks_to_boxes
from torchvision.transforms.v2 import functional as F
from torchvision.transforms import v2 as T
from torchvision.models.detection.faster_rcnn import FastRCNNPredictor
from torchvision.models.detection.mask_rcnn import MaskRCNNPredictor
from torchvision.models.detection import FasterRCNN
from torchvision.models.detection.rpn import AnchorGenerator
# Custom Function
import utils
from engine import train_one_epoch, evaluate# 버전 확인
# Torchvision의 버전이 0.15이하이면 앞으로 진핼할 아래의 코드는 실행이 되지 않음
print('Torch Version : ',torch.__version__)
print('Torchvision Version : ',torchvision.__version__)
print('Matplotlib Version : ',matplotlib.__version__)
print('Cv2 Version : ',cv2.__version__)Torch Version : 2.1.0+cu118
Torchvision Version : 0.16.0+cu118
Matplotlib Version : 3.4.3
Cv2 Version : 4.8.1Penn-Fudan Dataset 확인
PennFudan Dataset은 345개의 보행자 정보와 170개의 이미지 파일로 구성되어있으며 Annotation파일에는 세그먼트, 바운딩 박스, 이미지, 마스크 파일 이름의 정보가 포함되어 있습니다.
폴더 구조
PennFudanPed/
PedMasks/
FudanPed00001_mask.png
FudanPed00002_mask.png
FudanPed00003_mask.png
FudanPed00004_mask.png
...
PNGImages/
FudanPed00001.png
FudanPed00002.png
FudanPed00003.png
FudanPed00004.png
...
Annotation/
FudanPed00001.txt
FudanPed00002.txt
FudanPed00003.txt
FudanPed00004.txt
...
# 샘플 데이터 확인
def draw_images(annotation_file_path):
# 어노테이션 파일 읽기
with open(annotation_file_path, 'r') as file:
lines = file.readlines()
# 바운딩 박스 정보와 마스크 이미지 경로 추출
bounding_boxes = []
mask_image_path = None
for line in lines:
if line.startswith('Bounding box for object'):
coordinates = line.split(': ')[1].strip().replace('(', '').replace(')', '').split(' - ')
xmin, ymin = map(int, coordinates[0].split(', '))
xmax, ymax = map(int, coordinates[1].split(', '))
bounding_boxes.append(((xmin, ymin), (xmax, ymax)))
elif line.startswith('Pixel mask for object'):
mask_image_path = line.split(': ')[1].strip().replace('"', '')
# 이미지와 마스크 이미지 불러오기
image_path = annotation_file_path.replace('Annotation', 'PNGImages').replace('.txt', '.png')
png_image = cv2.imread(image_path)
png_image_rgb = cv2.cvtColor(png_image, cv2.COLOR_BGR2RGB)
mask_image = cv2.imread(mask_image_path, 0) # Grayscale
# 이미지에 바운딩 박스 그리기
boundingbox_image = png_image_rgb.copy()
for box in bounding_boxes:
cv2.rectangle(boundingbox_image, box[0], box[1], (255, 0, 0), 2) # Red bounding box
# 이미지 출력
fig, ax = plt.subplots(1, 3, figsize=(8, 9))
ax[0].imshow(png_image_rgb)
ax[0].axis('off') # Hide axes
ax[0].set_title('Basic Image')
ax[1].imshow(boundingbox_image)
ax[1].axis('off') # Hide axes
ax[1].set_title('Bounding Image')
ax[2].imshow(mask_image)
ax[2].axis('off') # Hide axes
ax[2].set_title('Segmentation Image')
plt.show()
for i in range(1,6):
annotation_file_path = f'PennFudanPed/Annotation/FudanPed0000{i}.txt'
draw_images(annotation_file_path)
데이터 세트 정의
이미지의 Detection 및 Segmentation을 위해 torch의 dataset 클래스를 상속하여 Custom Dataset을 구성합니다.
- Image
- [3, H, W]의 텐서 shape 혹은 PIL Image의 크기 [H, W] (torchvision.tv_tensors.Image)
- target
- boxes : [N, 4]의 shape [x0, y0, x1, y1] (torchvision.tv_tensors.BoundingBoxes)
- labels : 텐서 shape 정수 [N] (torch.Tensor)
- image_id : 이미지를 식별하기 위한 고유 ID
- area : BoundingBoxes의 영역 (torch.Tensor)
- iscrowd : 텐서 shape의 uint8[N] (torch.Tensor)
- masks : segmentation의 정보 [N, H, W] (torchvision.tv_tensors.Mask)
class PennFudanDataset(torch.utils.data.Dataset):
def __init__(self, root, transforms):
self.root = root
self.transforms = transforms
# 모든 이미지 파일으 불러오고 정렬
self.imgs = list(sorted(os.listdir(os.path.join(root, "PNGImages"))))
self.masks = list(sorted(os.listdir(os.path.join(root, "PedMasks"))))
def __getitem__(self, idx):
# 이미지와 마스크 불러오기
img_path = os.path.join(self.root, "PNGImages", self.imgs[idx])
mask_path = os.path.join(self.root, "PedMasks", self.masks[idx])
img = read_image(img_path)
mask = read_image(mask_path)
obj_ids = torch.unique(mask)
# 첫번째 ID는 Background 이므로 제거 (CoCodataset 기준)
obj_ids = obj_ids[1:]
num_objs = len(obj_ids)
# 색상으로 인코딩된 마스크를 세트로 분할
masks = (mask == obj_ids[:, None, None]).to(dtype=torch.uint8)
# 각 마스크의 Bounding box 좌표
boxes = masks_to_boxes(masks)
# there is only one class
labels = torch.ones((num_objs,), dtype=torch.int64)
image_id = idx
area = (boxes[:, 3] - boxes[:, 1]) * (boxes[:, 2] - boxes[:, 0])
# 모든 인스턴스가 iscrod라고 가정
iscrowd = torch.zeros((num_objs,), dtype=torch.int64)
# 샘플과 대상을 torchvision tv_tensors로 래핑합니다.
img = tv_tensors.Image(img)
target = {}
target["boxes"] = tv_tensors.BoundingBoxes(boxes, format="XYXY", canvas_size=F.get_size(img))
target["masks"] = tv_tensors.Mask(masks)
target["labels"] = labels
target["image_id"] = image_id
target["area"] = area
target["iscrowd"] = iscrowd
# 이미지 transform 설정
if self.transforms is not None:
img, target = self.transforms(img, target)
return img, target
def __len__(self):
return len(self.imgs)모델 훈련 및 결과 확인
Coco dataset으로 사전 훈련된 모델을 기반으로 Penn-Fudan Dataset에 맞춰 Fine-Tuning을 진행할 FastRCNN 모델을 구성합니다.
Feature를 추출할 모델은 Resnet50을 사용했습니다. 또한, Segmentation을 하기 위해 MaskRCNN도 사용합니다.
import torchvision
from torchvision.models.detection.faster_rcnn import FastRCNNPredictor
from torchvision.models.detection.mask_rcnn import MaskRCNNPredictor
def get_model_instance_segmentation(num_classes):
# Coco dataset으로 사전 훈련된 resnet50 불러오기
model = torchvision.models.detection.maskrcnn_resnet50_fpn(weights="DEFAULT")
# classification 모델의 input feature 갯수 가져오기
in_features = model.roi_heads.box_predictor.cls_score.in_features
# 모델의 head 변경
model.roi_heads.box_predictor = FastRCNNPredictor(in_features, num_classes)
# segmentation 모델의 input feature 갯수 가져오기
in_features_mask = model.roi_heads.mask_predictor.conv5_mask.in_channels
hidden_layer = 256
# 수정한 Layer들 model에 적용
model.roi_heads.mask_predictor = MaskRCNNPredictor(
in_features_mask,
hidden_layer,
num_classes
)
return model모델 훈련
데이터셋을 데이터 로더에 넣고 모델을 Fine-Tuning 합니다.
# 이미지 변환 함수
def get_transform(train):
transforms = []
if train:
transforms.append(T.RandomHorizontalFlip(0.5))
transforms.append(T.ToDtype(torch.float, scale=True))
transforms.append(T.ToPureTensor())
return T.Compose(transforms)# GPU or CPU 설정
device = torch.device('cuda') if torch.cuda.is_available() else torch.device('cpu')
# 사람, Background class 설정
num_classes = 2
# 이미지 변환 및 Dataset 생성
dataset = PennFudanDataset('data/PennFudanPed', get_transform(train=True))
dataset_test = PennFudanDataset('data/PennFudanPed', get_transform(train=False))
# Train, Test Dataset 분할
indices = torch.randperm(len(dataset)).tolist()
dataset = torch.utils.data.Subset(dataset, indices[:-50])
dataset_test = torch.utils.data.Subset(dataset_test, indices[-50:])
# 데이터 로더 정의
data_loader = torch.utils.data.DataLoader(
dataset,
batch_size=2,
shuffle=True,
collate_fn=utils.collate_fn
)
data_loader_test = torch.utils.data.DataLoader(
dataset_test,
batch_size=1,
shuffle=False,
collate_fn=utils.collate_fn
)
# 모델 생성
model = get_model_instance_segmentation(num_classes)
model.to(device)
# Optimizer 구성
params = [p for p in model.parameters() if p.requires_grad]
optimizer = torch.optim.SGD(
params,
lr=0.005,
momentum=0.9,
weight_decay=0.0005
)
# 스케쥴러 구성
lr_scheduler = torch.optim.lr_scheduler.StepLR(
optimizer,
step_size=3,
gamma=0.1
)
# 5회 학습
num_epochs = 5
for epoch in range(num_epochs):
# Train - 10회 마다 loss 출력
train_one_epoch(model, optimizer, data_loader, device, epoch, print_freq=100)
# learning rate 업데이트
lr_scheduler.step()
# Test 데이터로 평가
evaluate(model, data_loader_test, device=device)
print("종료")Epoch: [0] [ 0/60] eta: 0:02:10 lr: 0.000090 loss: 3.3485 (3.3485) loss_classifier: 0.8555 (0.8555) loss_box_reg: 0.2014 (0.2014) loss_mask: 2.2850 (2.2850) loss_objectness: 0.0051 (0.0051) loss_rpn_box_reg: 0.0016 (0.0016) time: 2.1828 data: 0.0141 max mem: 1945
Epoch: [0] [59/60] eta: 0:00:00 lr: 0.005000 loss: 0.3216 (0.7944) loss_classifier: 0.0498 (0.1673) loss_box_reg: 0.1535 (0.2185) loss_mask: 0.1549 (0.3942) loss_objectness: 0.0014 (0.0076) loss_rpn_box_reg: 0.0055 (0.0068) time: 0.2061 data: 0.0129 max mem: 2765
Epoch: [0] Total time: 0:00:14 (0.2396 s / it)
creating index...
index created!
Test: [ 0/50] eta: 0:00:05 model_time: 0.0931 (0.0931) evaluator_time: 0.0033 (0.0033) time: 0.1008 data: 0.0042 max mem: 2765
Test: [49/50] eta: 0:00:00 model_time: 0.0385 (0.0639) evaluator_time: 0.0025 (0.0043) time: 0.0587 data: 0.0057 max mem: 2765
Test: Total time: 0:00:03 (0.0746 s / it)
Averaged stats: model_time: 0.0385 (0.0639) evaluator_time: 0.0025 (0.0043)
Accumulating evaluation results...
DONE (t=0.01s).
Accumulating evaluation results...
DONE (t=0.01s).
IoU metric: bbox
Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.720
Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.990
Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.942
Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = -1.000
Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.654
Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.727
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.285
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.771
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.771
Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = -1.000
Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.776
Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.770
IoU metric: segm
Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.740
Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.990
Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.948
Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = -1.000
Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.533
Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.754
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.295
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.772
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.775
Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = -1.000
Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.753
Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.779
******Result******
-----Bounding BOX AP IoU=0.50:0.95: 0.72-----
-----Segmentation AP IoU=0.50:0.95: 0.74-----
......(생략)......
Epoch: [4] [ 0/60] eta: 0:00:13 lr: 0.000500 loss: 0.2298 (0.2298) loss_classifier: 0.0407 (0.0407) loss_box_reg: 0.0676 (0.0676) loss_mask: 0.1175 (0.1175) loss_objectness: 0.0001 (0.0001) loss_rpn_box_reg: 0.0040 (0.0040) time: 0.2326 data: 0.0141 max mem: 3162
Epoch: [4] [59/60] eta: 0:00:00 lr: 0.000500 loss: 0.1828 (0.1846) loss_classifier: 0.0246 (0.0256) loss_box_reg: 0.0360 (0.0391) loss_mask: 0.1087 (0.1163) loss_objectness: 0.0002 (0.0007) loss_rpn_box_reg: 0.0020 (0.0028) time: 0.1864 data: 0.0111 max mem: 3162
Epoch: [4] Total time: 0:00:11 (0.1938 s / it)
creating index...
index created!
Test: [ 0/50] eta: 0:00:02 model_time: 0.0391 (0.0391) evaluator_time: 0.0024 (0.0024) time: 0.0459 data: 0.0042 max mem: 3162
Test: [49/50] eta: 0:00:00 model_time: 0.0395 (0.0399) evaluator_time: 0.0017 (0.0026) time: 0.0487 data: 0.0057 max mem: 3162
Test: Total time: 0:00:02 (0.0489 s / it)
Averaged stats: model_time: 0.0395 (0.0399) evaluator_time: 0.0017 (0.0026)
Accumulating evaluation results...
DONE (t=0.00s).
Accumulating evaluation results...
DONE (t=0.00s).
IoU metric: bbox
Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.833
Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.992
Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.956
Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = -1.000
Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.682
Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.849
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.340
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.869
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.869
Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = -1.000
Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.782
Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.882
IoU metric: segm
Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.789
Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.992
Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.957
Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = -1.000
Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.631
Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.804
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.315
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.816
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.816
Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = -1.000
Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.741
Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.827
******Result******
-----Bounding BOX AP IoU=0.50:0.95: 0.833-----
-----Segmentation AP IoU=0.50:0.95: 0.789-----
종료5회 반복으로 학습한 결과 Object Detection의 IoU는 0.72에서 0.833까지 0.133상승했으며 segmentation은 0.74에서 0.789으로 0.049 상승된 수치를 보여주었습니다.
예측 결과 확인
샘플 데이터를 넣고 Objectdetection과 segmentation의 결과를 확인해보니, 생각보다 결과가 잘 나온것을 알 수 있습니다.
image = read_image("./PennFudanPed/PNGImages/PennPed00040.png")
eval_transform = get_transform(train=False)
# 모델 평가 모드 후 예측
model.eval()
with torch.no_grad():
x = eval_transform(image)
x = x[:3, ...].to(device)
predictions = model([x, ])
pred = predictions[0]
# 이미지 변환
image = (255.0 * (image - image.min()) / (image.max() - image.min())).to(torch.uint8)
image = image[:3, ...]
pred_labels = [f"pedestrian: {score:.3f}" for label, score in zip(pred["labels"], pred["scores"])]
pred_boxes = pred["boxes"].long()
output_image = draw_bounding_boxes(image, pred_boxes, pred_labels, colors="red")
# Mask 생성
masks = (pred["masks"] > 0.7).squeeze(1)
output_image = draw_segmentation_masks(output_image, masks, alpha=0.5, colors="blue")
# 이미지 확인
plt.figure(figsize=(12, 12))
plt.imshow(output_image.permute(1, 2, 0))
plt.axis('off')
plt.show()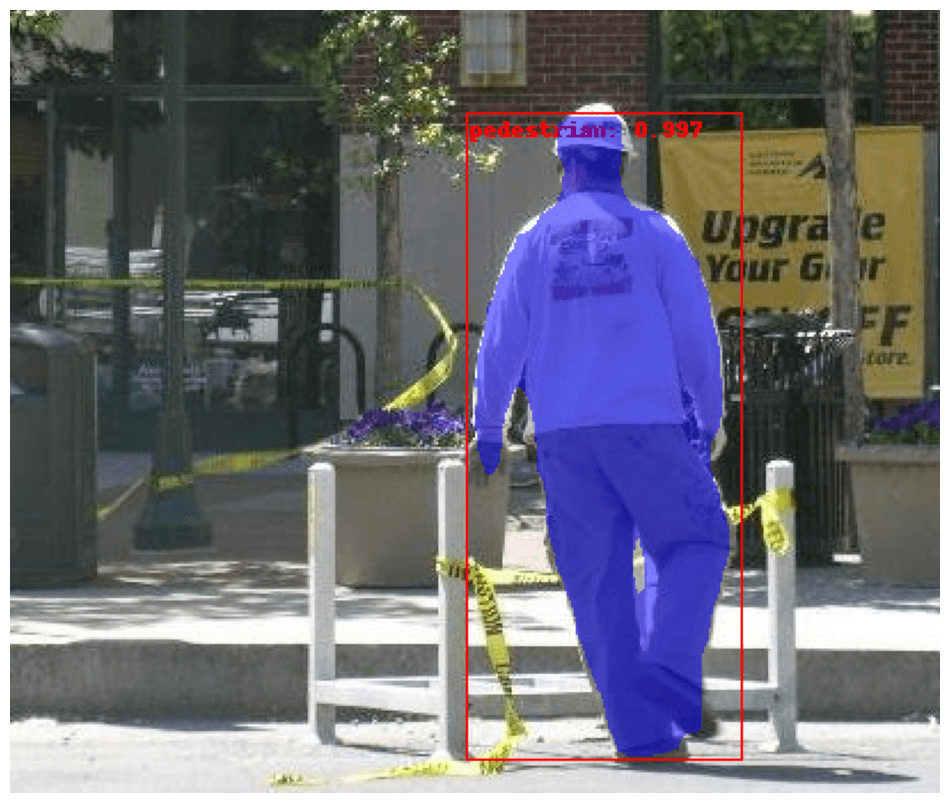
'AI > Computer Vision' 카테고리의 다른 글
| Pytorch를 사용하여 CIFAR10 이미지 분류기 만들기 (w. Vgg16) (1) | 2024.11.26 |
|---|---|
| MNIST 데이터로 해보는 CNN (Convolution Neural Network) (1) | 2024.11.20 |